


產(chǎn)品分類(lèi)
更多相關(guān)產(chǎn)品
- LG-YZ02型智能型液體滑動(dòng)軸承測(cè)試臺(tái)
- LG-PDC02型智能型皮帶傳動(dòng)測(cè)試臺(tái)
- LG-LDJ-A型螺栓組聯(lián)接測(cè)試臺(tái)
- LGJ-CX02型便攜式機(jī)械系統(tǒng)創(chuàng)新組合設(shè)計(jì)分析實(shí)驗(yàn)臺(tái)
- LGJ-CD03型便攜式機(jī)械系統(tǒng)傳動(dòng)創(chuàng)新組合設(shè)計(jì)實(shí)驗(yàn)臺(tái)
- LGJ-JK01型機(jī)械系統(tǒng)漸開(kāi)線齒輪參數(shù)測(cè)定實(shí)驗(yàn)箱
- LGJ-QTL01型曲柄導(dǎo)桿滑塊凸輪測(cè)試實(shí)驗(yàn)裝置
- LG-SKZC01型雙控滾動(dòng)軸承性能測(cè)試分析實(shí)驗(yàn)臺(tái)
- LG-VET01型振動(dòng)基礎(chǔ)培訓(xùn)系統(tǒng)(VFT)
- LG-BPS03型軸承測(cè)試實(shí)驗(yàn)平臺(tái)(BPS)
- LG-BPS02型變速齒輪箱預(yù)測(cè)仿真平臺(tái)(BPS)
- LG-MFS03型機(jī)器故障仿真平臺(tái)(MFS)
- LG-MR01型機(jī)械故障與轉(zhuǎn)子動(dòng)力學(xué)模擬系統(tǒng)
- LG-SAT18型軸校直實(shí)驗(yàn)臺(tái)(SAT)
- LG-DYS02型動(dòng)平衡測(cè)試實(shí)驗(yàn)臺(tái)
- LG-DCF03型動(dòng)平衡測(cè)試分析實(shí)驗(yàn)臺(tái)
- LG-CCT01型齒輪傳動(dòng)測(cè)試分析實(shí)驗(yàn)臺(tái)
- LG-JXD03型機(jī)械系統(tǒng)創(chuàng)新搭接及運(yùn)動(dòng)測(cè)試實(shí)訓(xùn)平臺(tái)
- LGJ-DJ02型機(jī)械系統(tǒng)創(chuàng)新設(shè)計(jì)搭接裝配訓(xùn)練實(shí)驗(yàn)臺(tái)
- LG-JXZ01型機(jī)械系統(tǒng)綜合實(shí)訓(xùn)裝置
- LG-JXYD01型機(jī)械運(yùn)動(dòng)創(chuàng)新拼裝實(shí)驗(yàn)臺(tái)
- LG-LX01型螺旋傳動(dòng)測(cè)試分析實(shí)驗(yàn)臺(tái)
- LGJ-PH04型平面機(jī)構(gòu)運(yùn)動(dòng)設(shè)計(jì)分析與測(cè)試實(shí)驗(yàn)臺(tái)
- LG-PCF01I型平面機(jī)構(gòu)創(chuàng)意組合測(cè)試分析實(shí)驗(yàn)臺(tái)
- LG-PCF02平面機(jī)構(gòu)創(chuàng)意組合綜合測(cè)試分析實(shí)驗(yàn)臺(tái)
- LGJ-LS02型螺栓與螺栓組聯(lián)接綜合測(cè)試實(shí)驗(yàn)臺(tái)
- LGJ-JTS01型機(jī)械動(dòng)力學(xué)調(diào)速實(shí)驗(yàn)臺(tái)
- LG-JLC01型機(jī)械傳動(dòng)創(chuàng)意組合測(cè)試實(shí)驗(yàn)臺(tái)
- LGJ-AZ01型機(jī)械系統(tǒng)A軸系結(jié)構(gòu)設(shè)計(jì)實(shí)驗(yàn)箱
- LGJ-ZZP03型軸系裝配工藝實(shí)驗(yàn)實(shí)訓(xùn)臺(tái)
- LGJ-LX02型機(jī)械系統(tǒng)輪系創(chuàng)新組合及結(jié)構(gòu)分析綜合實(shí)驗(yàn)臺(tái)
- LGJ-LX01型機(jī)械系統(tǒng)輪系創(chuàng)新組合及虛擬演示實(shí)驗(yàn)臺(tái)
- LGJ-JG01型機(jī)械系統(tǒng)空間機(jī)構(gòu)創(chuàng)新組合及虛擬演示實(shí)驗(yàn)臺(tái)
- LGJ-JG02型機(jī)械系統(tǒng)空間機(jī)構(gòu)創(chuàng)新組合設(shè)計(jì)實(shí)驗(yàn)臺(tái)
- LGJ-CD01型機(jī)械傳動(dòng)性能綜合測(cè)試實(shí)驗(yàn)臺(tái)
- LGJ-JDC01型機(jī)電控制傳動(dòng)測(cè)試實(shí)驗(yàn)臺(tái)
- LGJ-JC01型機(jī)械系統(tǒng)集成及參數(shù)可視化分析綜合實(shí)驗(yàn)臺(tái)
- LG-NJJ02型自動(dòng)化夾具綜合實(shí)驗(yàn)臺(tái)
- LG-JCD01型工業(yè)機(jī)械傳動(dòng)裝調(diào)競(jìng)賽平臺(tái)
- LGJ-LM01型工業(yè)機(jī)器人多功能應(yīng)用實(shí)訓(xùn)裝置
LG-PDC02型智能型皮帶傳動(dòng)測(cè)試臺(tái)
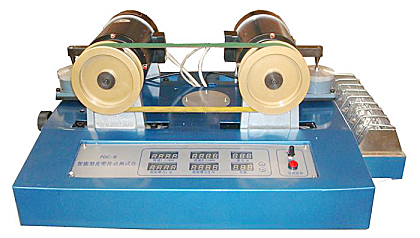
LG-PDC02型 智能型皮帶傳動(dòng)測(cè)試臺(tái)主要用于<<機(jī)械設(shè)計(jì)>>中皮帶傳動(dòng)實(shí)驗(yàn)教學(xué),利用它來(lái)觀察皮帶輪傳動(dòng)的結(jié)構(gòu),測(cè)定皮帶傳動(dòng)滑差率、效率、有效圓周力、最大有效圓周力和張緊力。其中張緊力的測(cè)定功能是采用液壓裝置,利用液態(tài)內(nèi)部相等的原理,突破了傳統(tǒng)測(cè)試機(jī)無(wú)法真實(shí)反應(yīng)數(shù)據(jù)的弊端,利用測(cè)力傳感器采集數(shù)據(jù)通過(guò)計(jì)算機(jī)處理分析并繪制曲線。該實(shí)驗(yàn)臺(tái)傳動(dòng)平穩(wěn),數(shù)據(jù)真實(shí),結(jié)構(gòu)合理。
一、實(shí)驗(yàn)內(nèi)容
1、皮帶傳動(dòng)滑動(dòng)曲線和效率曲線的測(cè)量繪制以及打滑對(duì)傳動(dòng)效率的影響。
2、皮帶傳動(dòng)運(yùn)動(dòng)模擬:該實(shí)驗(yàn)裝置配置的計(jì)算機(jī)軟件,通過(guò)數(shù)模計(jì)算作出帶傳動(dòng)運(yùn)動(dòng)模擬,可清楚觀察皮帶傳動(dòng)的彈性滑動(dòng)和打滑現(xiàn)象。
3、皮帶傳動(dòng)受力分析實(shí)驗(yàn):測(cè)定有效圓周力、最大有效圓周力和張緊力,計(jì)算帶與帶輪之間的滑動(dòng)摩擦系數(shù)或當(dāng)量摩擦系數(shù)和傳遞的*大功率。
二、性能特點(diǎn)
1、利用液壓原理設(shè)計(jì)的獨(dú)特的張緊力測(cè)試裝置,用壓力傳感器測(cè)量張緊力,能實(shí)現(xiàn)皮帶傳動(dòng)受力分析實(shí)驗(yàn)。
2、采用傳感器和A/D采集并轉(zhuǎn)換成主動(dòng)帶輪和從動(dòng)帶輪的驅(qū)動(dòng)力矩和阻力矩?cái)?shù)據(jù),采用角位移傳感器和A/D板采集并轉(zhuǎn)換成主、從動(dòng)帶輪的轉(zhuǎn)數(shù)。*后輸入計(jì)算機(jī)進(jìn)行處理作出滑動(dòng)曲線和效率曲線。
3、可通過(guò)計(jì)算機(jī)測(cè)試分析軟件進(jìn)行皮帶傳動(dòng)的運(yùn)動(dòng)模擬,可觀察彈性滑動(dòng)及打滑現(xiàn)象。
4、可更換不同直徑的平皮帶輪和三角帶輪,做不同帶傳動(dòng)的實(shí)驗(yàn)。
5、計(jì)算機(jī)測(cè)試分析軟件功能強(qiáng)大,可自動(dòng)或人機(jī)結(jié)合進(jìn)行測(cè)試分析、理論仿真、保存數(shù)據(jù)和提交實(shí)驗(yàn)報(bào)告。
三、實(shí)驗(yàn)臺(tái)操作步驟
1、松開(kāi)預(yù)緊裝置調(diào)整螺桿,用手拉皮帶,如果電動(dòng)機(jī)滑板靈活滑動(dòng)即可。
2、打開(kāi)總電源,將調(diào)速器調(diào)到*低速,然后慢慢的將調(diào)速器的速度調(diào)到1200n/min左右,因沒(méi)有張緊力,故皮帶在打滑。
3、旋轉(zhuǎn)預(yù)緊裝置的預(yù)緊螺栓,皮帶開(kāi)始預(yù)緊,直到主動(dòng)輪與叢動(dòng)輪的速度接近相等即可。
4、開(kāi)啟計(jì)算機(jī),單擊“皮帶測(cè)試”進(jìn)入宇航界面,單擊“左鍵”進(jìn)入皮帶測(cè)試界面。
5、待皮帶轉(zhuǎn)速平穩(wěn)后,在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊“穩(wěn)定測(cè)試”,對(duì)帶傳動(dòng)的主動(dòng)輪、從動(dòng)輪的轉(zhuǎn)速,以及主動(dòng)輪、從動(dòng)輪的轉(zhuǎn)矩,進(jìn)行第一個(gè)工況的數(shù)據(jù)采集和處理,并在皮帶傳動(dòng)實(shí)驗(yàn)界面的虛擬儀表上顯示。
6、在實(shí)驗(yàn)臺(tái)的操作面板上按動(dòng)加載按鈕1-2次,待皮帶轉(zhuǎn)速平穩(wěn)后,在皮帶傳動(dòng)實(shí)驗(yàn)界面上再次單擊"穩(wěn)定測(cè)試",進(jìn)行第二個(gè)工況的數(shù)據(jù)采集和處理。如此類(lèi)推,直至皮帶打滑。
7、在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊"實(shí)測(cè)曲線",在皮帶傳動(dòng)實(shí)驗(yàn)界面上作出帶傳動(dòng)的實(shí)測(cè)滑差-效率曲線圖。
8、若實(shí)驗(yàn)結(jié)果不夠理想,在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊"重做實(shí)驗(yàn)",清零,即可從第3步開(kāi)始重做一次實(shí)驗(yàn)。
9、在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊"運(yùn)動(dòng)模擬",作出帶傳動(dòng)運(yùn)動(dòng)模擬,可清楚觀察皮帶傳動(dòng)的彈性滑動(dòng)和打滑現(xiàn)象。
10、如果實(shí)驗(yàn)結(jié)束,單擊"退出",返回Windows界面。
11、關(guān)掉實(shí)驗(yàn)臺(tái)操作面板上的調(diào)速按鈕,使電機(jī)停轉(zhuǎn)。
四、主要技術(shù)參數(shù)
1、帶輪直徑:D1=D2=120mm
2、傳感器量程:50N 精度:0.1%
3、驅(qū)動(dòng)電機(jī)功率:355W
4、調(diào)速范圍:0-1500rpm
5、負(fù)載電機(jī)功率:300W
6、負(fù)載變動(dòng)范圍:0-300W(有級(jí))
7、張緊力傳感器:0-58.8N 精度:0.3%
8、實(shí)驗(yàn)臺(tái)外形尺寸:740×475×305
9、實(shí)驗(yàn)臺(tái)重量:42kg
五、基本配置
1、PDC-II智能型皮帶測(cè)試臺(tái) 1臺(tái)
2、BLR-12B負(fù)載傳感器 50N 2個(gè)
3、BLR-12B張緊力傳感器 58.8N 1個(gè)
4、PL-580×25平皮帶 2根(含增加1根)
5、VL-580×25三角皮帶 2根(含增加1根)
6、燈泡 60W 220V 5個(gè)(增加5個(gè))
7、測(cè)試軟件光盤(pán) 1張
8、產(chǎn)品說(shuō)明書(shū)
9、實(shí)驗(yàn)指導(dǎo)書(shū)
1、皮帶傳動(dòng)滑動(dòng)曲線和效率曲線的測(cè)量繪制以及打滑對(duì)傳動(dòng)效率的影響。
2、皮帶傳動(dòng)運(yùn)動(dòng)模擬:該實(shí)驗(yàn)裝置配置的計(jì)算機(jī)軟件,通過(guò)數(shù)模計(jì)算作出帶傳動(dòng)運(yùn)動(dòng)模擬,可清楚觀察皮帶傳動(dòng)的彈性滑動(dòng)和打滑現(xiàn)象。
3、皮帶傳動(dòng)受力分析實(shí)驗(yàn):測(cè)定有效圓周力、最大有效圓周力和張緊力,計(jì)算帶與帶輪之間的滑動(dòng)摩擦系數(shù)或當(dāng)量摩擦系數(shù)和傳遞的*大功率。
二、性能特點(diǎn)
1、利用液壓原理設(shè)計(jì)的獨(dú)特的張緊力測(cè)試裝置,用壓力傳感器測(cè)量張緊力,能實(shí)現(xiàn)皮帶傳動(dòng)受力分析實(shí)驗(yàn)。
2、采用傳感器和A/D采集并轉(zhuǎn)換成主動(dòng)帶輪和從動(dòng)帶輪的驅(qū)動(dòng)力矩和阻力矩?cái)?shù)據(jù),采用角位移傳感器和A/D板采集并轉(zhuǎn)換成主、從動(dòng)帶輪的轉(zhuǎn)數(shù)。*后輸入計(jì)算機(jī)進(jìn)行處理作出滑動(dòng)曲線和效率曲線。
3、可通過(guò)計(jì)算機(jī)測(cè)試分析軟件進(jìn)行皮帶傳動(dòng)的運(yùn)動(dòng)模擬,可觀察彈性滑動(dòng)及打滑現(xiàn)象。
4、可更換不同直徑的平皮帶輪和三角帶輪,做不同帶傳動(dòng)的實(shí)驗(yàn)。
5、計(jì)算機(jī)測(cè)試分析軟件功能強(qiáng)大,可自動(dòng)或人機(jī)結(jié)合進(jìn)行測(cè)試分析、理論仿真、保存數(shù)據(jù)和提交實(shí)驗(yàn)報(bào)告。
三、實(shí)驗(yàn)臺(tái)操作步驟
1、松開(kāi)預(yù)緊裝置調(diào)整螺桿,用手拉皮帶,如果電動(dòng)機(jī)滑板靈活滑動(dòng)即可。
2、打開(kāi)總電源,將調(diào)速器調(diào)到*低速,然后慢慢的將調(diào)速器的速度調(diào)到1200n/min左右,因沒(méi)有張緊力,故皮帶在打滑。
3、旋轉(zhuǎn)預(yù)緊裝置的預(yù)緊螺栓,皮帶開(kāi)始預(yù)緊,直到主動(dòng)輪與叢動(dòng)輪的速度接近相等即可。
4、開(kāi)啟計(jì)算機(jī),單擊“皮帶測(cè)試”進(jìn)入宇航界面,單擊“左鍵”進(jìn)入皮帶測(cè)試界面。
5、待皮帶轉(zhuǎn)速平穩(wěn)后,在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊“穩(wěn)定測(cè)試”,對(duì)帶傳動(dòng)的主動(dòng)輪、從動(dòng)輪的轉(zhuǎn)速,以及主動(dòng)輪、從動(dòng)輪的轉(zhuǎn)矩,進(jìn)行第一個(gè)工況的數(shù)據(jù)采集和處理,并在皮帶傳動(dòng)實(shí)驗(yàn)界面的虛擬儀表上顯示。
6、在實(shí)驗(yàn)臺(tái)的操作面板上按動(dòng)加載按鈕1-2次,待皮帶轉(zhuǎn)速平穩(wěn)后,在皮帶傳動(dòng)實(shí)驗(yàn)界面上再次單擊"穩(wěn)定測(cè)試",進(jìn)行第二個(gè)工況的數(shù)據(jù)采集和處理。如此類(lèi)推,直至皮帶打滑。
7、在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊"實(shí)測(cè)曲線",在皮帶傳動(dòng)實(shí)驗(yàn)界面上作出帶傳動(dòng)的實(shí)測(cè)滑差-效率曲線圖。
8、若實(shí)驗(yàn)結(jié)果不夠理想,在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊"重做實(shí)驗(yàn)",清零,即可從第3步開(kāi)始重做一次實(shí)驗(yàn)。
9、在皮帶傳動(dòng)實(shí)驗(yàn)界面上單擊"運(yùn)動(dòng)模擬",作出帶傳動(dòng)運(yùn)動(dòng)模擬,可清楚觀察皮帶傳動(dòng)的彈性滑動(dòng)和打滑現(xiàn)象。
10、如果實(shí)驗(yàn)結(jié)束,單擊"退出",返回Windows界面。
11、關(guān)掉實(shí)驗(yàn)臺(tái)操作面板上的調(diào)速按鈕,使電機(jī)停轉(zhuǎn)。
四、主要技術(shù)參數(shù)
1、帶輪直徑:D1=D2=120mm
2、傳感器量程:50N 精度:0.1%
3、驅(qū)動(dòng)電機(jī)功率:355W
4、調(diào)速范圍:0-1500rpm
5、負(fù)載電機(jī)功率:300W
6、負(fù)載變動(dòng)范圍:0-300W(有級(jí))
7、張緊力傳感器:0-58.8N 精度:0.3%
8、實(shí)驗(yàn)臺(tái)外形尺寸:740×475×305
9、實(shí)驗(yàn)臺(tái)重量:42kg
五、基本配置
1、PDC-II智能型皮帶測(cè)試臺(tái) 1臺(tái)
2、BLR-12B負(fù)載傳感器 50N 2個(gè)
3、BLR-12B張緊力傳感器 58.8N 1個(gè)
4、PL-580×25平皮帶 2根(含增加1根)
5、VL-580×25三角皮帶 2根(含增加1根)
6、燈泡 60W 220V 5個(gè)(增加5個(gè))
7、測(cè)試軟件光盤(pán) 1張
8、產(chǎn)品說(shuō)明書(shū)
9、實(shí)驗(yàn)指導(dǎo)書(shū)