


- LGL-PT06型工業(yè)機(jī)器人噴涂實(shí)操工作站
- LGL-HJ06型工業(yè)機(jī)器人焊接實(shí)操工作站
- LG-IRH01型機(jī)器人焊接工作站實(shí)訓(xùn)平臺
- LG-IRBL02型并聯(lián)機(jī)器人視覺分揀工作站
- LGCO-BOT01型協(xié)作機(jī)器人技術(shù)及應(yīng)用綜合實(shí)訓(xùn)平臺
- LGJ-ZH02型工業(yè)機(jī)器人組合式應(yīng)用實(shí)訓(xùn)裝置
- LG-GJQS1型工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺
- LG-GJQS2A型工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺
- LGY-PCB01型工業(yè)機(jī)器人PCB異形插件工作站
- LGY-CX01型FMS工業(yè)機(jī)器人智能制造實(shí)訓(xùn)平臺
- LG-IRF03型機(jī)器人RFID分揀實(shí)訓(xùn)系統(tǒng)
- LG-IRF01型機(jī)器人光機(jī)電一體化分揀實(shí)訓(xùn)系統(tǒng)
- LG-X102型工業(yè)機(jī)器人操作與運(yùn)維工作站
- LGX-B03型工業(yè)機(jī)器人運(yùn)用與維護(hù)實(shí)訓(xùn)平臺
- LG-IRB03型工業(yè)機(jī)器人實(shí)訓(xùn)平臺(IRB120機(jī)器人)
- LGHL-01A型工業(yè)物聯(lián)網(wǎng)技術(shù)應(yīng)用實(shí)訓(xùn)臺
- LG-RCZ02型工業(yè)機(jī)器人拆裝實(shí)訓(xùn)工作站
- LGY-CX01型機(jī)器人機(jī)床上下料實(shí)操工作站
- LGL-HJ06型工業(yè)機(jī)器人焊接實(shí)操工作站
- LG-RMD05型工業(yè)機(jī)器人碼垛實(shí)操工作站
- LGJD-CZ02A型協(xié)作機(jī)器人自動生產(chǎn)線實(shí)訓(xùn)裝置
- LGCO-BOT01型智能協(xié)作機(jī)器人技術(shù)及應(yīng)用綜合實(shí)訓(xùn)平臺
- LG-MPS03型智能制造模塊化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
- LGY-CX06型智能制造生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
- LGY-PCB01型工業(yè)機(jī)器人PCB異形插件工作站
- LG-BCF01型工業(yè)機(jī)器人基礎(chǔ)應(yīng)用實(shí)訓(xùn)平臺(國產(chǎn)自主品牌)
- LG-ISFTP03型智能制造單元系統(tǒng)集成應(yīng)用平臺
- LG-IRE01型工業(yè)機(jī)器人綜合實(shí)訓(xùn)平臺(國產(chǎn)埃夫特)
- LG-IRB01A型工業(yè)機(jī)器人操作與運(yùn)維實(shí)訓(xùn)平臺
- LG-IGZ05型工業(yè)網(wǎng)絡(luò)智能控制與維護(hù)系統(tǒng)
- LGJS-300A型 電工職業(yè)技能等級認(rèn)定綜合實(shí)訓(xùn)平臺
- LG-SJ05Q型機(jī)器視覺五子棋對弈視覺工作站
- LGY-JD05B型 通用機(jī)電設(shè)備安裝與調(diào)試實(shí)訓(xùn)裝備
- LGJD-CZ02A型 機(jī)電一體化協(xié)作機(jī)器人生產(chǎn)線實(shí)訓(xùn)平臺
- LG-X101C型 1+X考證工業(yè)機(jī)器人操作與運(yùn)維工作站
- LG-RCZ01A型 工業(yè)機(jī)器裝調(diào)與運(yùn)維員培訓(xùn)考核系統(tǒng)
- LGY-ZD01F型自動化控制實(shí)訓(xùn)系統(tǒng)
- LGY-XH03B型工業(yè)機(jī)器人循環(huán)生產(chǎn)線實(shí)訓(xùn)裝備
- LGY-ZD05B型自動生產(chǎn)線實(shí)訓(xùn)考核裝備
- LGY-LS01A型數(shù)字孿生虛擬調(diào)試實(shí)訓(xùn)考核裝置
LGL-HJ06型工業(yè)機(jī)器人焊接實(shí)操工作站
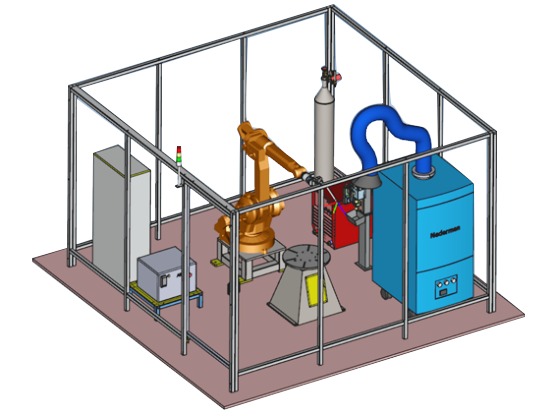
LGL-HJ06型 工業(yè)機(jī)器人焊接實(shí)操工作站主要開展焊接技術(shù)培訓(xùn),可滿足學(xué)生動手能力的強(qiáng)化訓(xùn)練,還可作為高級工、技師能力提升的實(shí)訓(xùn)設(shè)備,能為解決在工作崗位所遇到的技術(shù)問題提供有建設(shè)性的解決方案,焊接是當(dāng)前工業(yè)機(jī)器人應(yīng)用最廣的領(lǐng)域之一,主要面向汽車制造、設(shè)備生產(chǎn)等方向。工業(yè)機(jī)器人的高重復(fù)定位精度和穩(wěn)定的工作狀態(tài),可以保證焊接工藝的一致性和高效性,高靈活性使其工作于空間狹小、周邊復(fù)雜甚至危險的環(huán)境中,在車身生產(chǎn)線上已經(jīng)基本代替人工完成弧焊、點(diǎn)焊等工作,業(yè)機(jī)器人焊接實(shí)訓(xùn)工作站以真實(shí)工廠應(yīng)用要求為基礎(chǔ),優(yōu)化功能設(shè)計,提高系統(tǒng)靈活度,融入實(shí)訓(xùn)教學(xué)過程,為具有一定工業(yè)機(jī)器人基礎(chǔ)操作基礎(chǔ)的學(xué)生提供結(jié)合焊接工藝的實(shí)訓(xùn)平臺。
LGL-HJ06型 工業(yè)機(jī)器人焊接實(shí)訓(xùn)平臺由工業(yè)機(jī)器人、焊接電源、送絲機(jī)、焊槍、清槍剪絲站、變位機(jī)及工裝夾具、工業(yè)除煙除塵凈化器、安全防護(hù)組件及配套設(shè)備構(gòu)成,是利用工業(yè)機(jī)器人這一柔性執(zhí)行單元,結(jié)合弧焊工藝實(shí)現(xiàn)的實(shí)際加工單元,可以完成對板型、管型等零件的焊接加工。在學(xué)生充分學(xué)習(xí)工業(yè)機(jī)器人基礎(chǔ)操作后,完全掌握參數(shù)設(shè)置、軌跡編程等技能基礎(chǔ)上,結(jié)合焊接工藝完成與真實(shí)工廠應(yīng)用相同的實(shí)訓(xùn)項(xiàng)目,了解焊接工作站的構(gòu)成及維護(hù),縮短崗前培訓(xùn)過程,提高就業(yè)競爭力。
一、產(chǎn)品特點(diǎn)
1、煙塵凈化單元(吸管安裝在工作區(qū)域內(nèi),能夠直接吸走煙塵和飛濺,減少對環(huán)境煙塵排放,能防止焊接廢氣對人體的傷害。)
2、焊接單元(由焊機(jī)、送絲機(jī)、送絲盤、焊槍、100%工業(yè)液體二氧化碳等組成)
3、控制柜單元(主要由PLC、觸摸屏、開關(guān)電源、等組成)
二、工作站運(yùn)行環(huán)境參數(shù)
1、交流電源:單相 AC 380 V±10% 50Hz
2、工作環(huán)境:-10~50℃;環(huán)境濕度:≤90%無水珠凝結(jié)
3、整機(jī)功耗:6kW
4、安全保護(hù)措施:安全保護(hù)措施:具有接地、漏電壓、漏電流保護(hù),安全指標(biāo)符合國家標(biāo)準(zhǔn)
5、外形尺寸(長寬高):長×寬×高=(4500×4500×2000)mm(±5%)
三、焊接參數(shù)
1、三相380V/50Hz 額定輸入功率:14.4KVA 額定輸入電流:25A(Imax32A)
2、輸出空載電壓:93V 輸出電壓調(diào)節(jié)范圍:14-40v 效率/功率因數(shù):≥89% / ≥0.87
3、氣體流量:15-20L/min 使用焊絲直徑(mm):Ф0.8、Ф1.0、Ф1.2Ф1.6 主變壓器絕緣等級:H
四、工業(yè)機(jī)器人技術(shù)參數(shù)
1、軸數(shù):6軸
2、負(fù)載:6kg
3、工作范圍:1400mm
4、重復(fù)定位精度:±0.1mm
5、防護(hù)等級:IP54
6、控制方式:AC伺服控制
7、集成信號源:上臂12路信號,配標(biāo)準(zhǔn)機(jī)器控制系統(tǒng)
五、實(shí)訓(xùn)項(xiàng)目
1、工作站結(jié)構(gòu)認(rèn)知
2、關(guān)鍵設(shè)備的特性和參數(shù)設(shè)置
3、工業(yè)機(jī)器人及周邊設(shè)備的維護(hù)及典型錯誤排查
4、工業(yè)機(jī)器人焊接應(yīng)用軟件的參數(shù)設(shè)置及工藝規(guī)劃
5、焊槍TCP參數(shù)標(biāo)定
6、無焊接實(shí)現(xiàn)狀態(tài)下平面簡單焊接軌跡的編程
7、結(jié)合焊接工藝的簡單焊接實(shí)訓(xùn)
8、焊接參數(shù)(電流、電壓、焊接速度)對焊道成型影響的實(shí)訓(xùn)
9、平面堆焊實(shí)訓(xùn)
10、平板對接實(shí)訓(xùn)
11、角焊縫焊接實(shí)訓(xùn)
12、坡口對接焊縫焊接實(shí)訓(xùn)
13、無焊接實(shí)現(xiàn)狀態(tài)下配合變位機(jī)聯(lián)動的立體焊接軌跡的編程
14、結(jié)合焊接工藝的配合變位機(jī)聯(lián)動的立體焊接實(shí)訓(xùn)
15、基于RobotArt的工作站模型環(huán)境搭建與配置
16、基于RobotArt的簡單焊接工藝離線編程應(yīng)用
17、基于RobotArt的配合變位機(jī)的復(fù)雜工藝離線編程應(yīng)用