


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LG-GSF02型兩軸伺服運動控制實訓(xùn)系統(tǒng)
- LG-EWK02型二維運動控制實驗平臺(PLC控制)
- LG-JDQ02型機電技術(shù)綜合實訓(xùn)考核平臺
- LG-SF05型伺服電機運動控制實訓(xùn)裝置
- LG-JNT02型機電技術(shù)技能實訓(xùn)考核裝置
- LGJ-ZK01型光機電一體化工業(yè)自動化控制應(yīng)用實訓(xùn)裝置
- LGJS-2型模塊式柔性自動環(huán)形生產(chǎn)線實驗系統(tǒng)(工程型)
- LGW-DJ01型電機運動控制實訓(xùn)裝置
- LGJ-CC01型光機電一體化小型立體倉儲實訓(xùn)臺
- LGJ-JXS02型光機電一體化桁架機械手實訓(xùn)裝置
- LGJ-SXS03型光機電一體化三軸機械手控制裝置
- LGJ-FL01型變頻調(diào)速與運輸分流控制裝置
- LGJ-SH01型數(shù)字化伺服驅(qū)動與開閉環(huán)定位控制裝置
- LG-RX01型機電一體化柔性生產(chǎn)線加工系統(tǒng)(五站)
- LG-MAI01型煤礦礦山機電一體化綜合實訓(xùn)考核平臺
- LGJ-JD08型自動化生產(chǎn)線考核實訓(xùn)系統(tǒng)
- LG-MPS02A型模塊式柔性自動化生產(chǎn)線實訓(xùn)系統(tǒng)(八站)
- LG-MPS01型網(wǎng)絡(luò)型模塊式柔性自動化生產(chǎn)線實驗系統(tǒng)(六站)
- LG-JDYQ01型光機電液氣一體化實訓(xùn)裝置
- LG-JDYQ02型機電液氣一體化實訓(xùn)裝置
- LG-RGZ03型柔性灌裝自動化生產(chǎn)線實訓(xùn)系統(tǒng)
- LGPS-03型機電一體化綜合系統(tǒng)實訓(xùn)實驗裝置
- LGJ-CZ04型拆裝式生產(chǎn)線組裝與調(diào)試實訓(xùn)系統(tǒng)
- LGJD-CZ02型自動生產(chǎn)線拆裝與調(diào)試實訓(xùn)裝置
- LG-WLE01型大型物流系統(tǒng)實訓(xùn)裝置
- LGJS-1型現(xiàn)代物流倉儲自動化實驗系統(tǒng)
- LGJ-Q02型機電工業(yè)自動化綜合實訓(xùn)裝置
- LGJ-JXS04型光機電一體化機械手實訓(xùn)裝置(閉環(huán)控制)
- LGJX-82C型工業(yè)機器手實訓(xùn)裝置
- LG-235A型光機電一體化高速分揀實訓(xùn)系統(tǒng)
- LG-GSF01型運動控制綜合實訓(xùn)平臺
- LGCL-01型材料分揀實訓(xùn)裝置
- LGJX-82F型立體倉庫實訓(xùn)裝置
- LGJX-82E型立體倉庫實訓(xùn)裝置
- LGJX-82B型平面雙軸運行控制實訓(xùn)裝置
- LGJX-82A型循環(huán)搬運自動控制實訓(xùn)裝置
- LGJD-04型機電一體化實訓(xùn)考核裝置(循環(huán)控制)
- LGJD-02型光機電一體化控制實訓(xùn)裝置
- LGJD-01型光機電一體化控制實訓(xùn)裝置系統(tǒng)
- LGY-JD06型機電綜合實訓(xùn)考核平臺
LG-EWK02型二維運動控制實驗平臺(PLC控制)

一、概述
LG-EWK02型 二維運動控制實驗平臺是集運動控制卡、PLC可編程控制器、步進(jìn)電機及驅(qū)動器、開關(guān)電源、XY控制平臺及運動控制軟件于一體的理想教學(xué)實驗系統(tǒng)。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現(xiàn)平面內(nèi)X、Y軸方向的運動控制,用于實現(xiàn)目標(biāo)軌跡和動作。二維運動控制實驗平臺實驗系統(tǒng)軟件包括基于軸的控制、基于坐標(biāo)系的控制、命令編輯和運行、數(shù)控代碼編輯和運行、復(fù)雜運動軌跡控制。
LG-EWK02型 二維運動控制實驗平臺是集運動控制卡、PLC可編程控制器、步進(jìn)電機及驅(qū)動器、開關(guān)電源、XY控制平臺及運動控制軟件于一體的理想教學(xué)實驗系統(tǒng)。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現(xiàn)平面內(nèi)X、Y軸方向的運動控制,用于實現(xiàn)目標(biāo)軌跡和動作。二維運動控制實驗平臺實驗系統(tǒng)軟件包括基于軸的控制、基于坐標(biāo)系的控制、命令編輯和運行、數(shù)控代碼編輯和運行、復(fù)雜運動軌跡控制。
二、技術(shù)性能
1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;最大運動速度:20mm/s;最大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環(huán)境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×15cm
三、系統(tǒng)結(jié)構(gòu)及組成
二維運動控制實驗平臺主要由步進(jìn)電機控制系統(tǒng)和電腦桌兩部分組成,結(jié)構(gòu)框圖如下圖所示:
1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;最大運動速度:20mm/s;最大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環(huán)境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×15cm
三、系統(tǒng)結(jié)構(gòu)及組成
二維運動控制實驗平臺主要由步進(jìn)電機控制系統(tǒng)和電腦桌兩部分組成,結(jié)構(gòu)框圖如下圖所示:
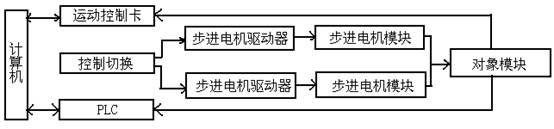
系統(tǒng)結(jié)構(gòu)框圖
1、對象模塊
步進(jìn)電機二個:采用二個2相步進(jìn)電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
2、PLC一個
西門子S7-200 Smart SR40 輸入24點、輸出 16點;繼電器輸出,也可根據(jù)用戶要求配置不同型號、品牌的PLC主機。配有通訊下載電纜—個,用于連接PLC主機與上位編程軟件,實現(xiàn)PLC程序的上載、下載及PLC內(nèi)部數(shù)據(jù)監(jiān)控。
3、運動控制卡一塊
(1)32位PCI總線,即插即用
(2)所有輸入、輸出均采用光耦隔離,抗干擾性強
(3)2軸伺服/步進(jìn)電機控制,每軸可獨立運動,互不影響
(4)脈沖輸出的頻率誤差小于0.1%
(5)最大脈沖輸出頻率為2MHz
(6)脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
(7)梯形加/減速
(8)任意2軸直線插補
(9)最大插補速度1MHz
(10)運動中可以實時讀出邏輯位置、實際位置、驅(qū)動速度
(11)24路數(shù)字輸入,12路輸出
(12)每軸兩個限位輸入,可設(shè)置成無效,作為通用輸入使用
(13)支持在一個系統(tǒng)中使用多達(dá)16個控制卡
(14)支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統(tǒng)
4、步進(jìn)電機驅(qū)動器二個
(1)輸出電流:最大電流為2A
(2) 輸出方式:光光耦合器·開路集電極輸出
5、穩(wěn)壓直流電源 一個
(1)輸出電流:最大輸出電流為5A
(2)輸出電壓:24V
(3)輸出功率:120w
6、運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據(jù)自己的需要進(jìn)行相應(yīng)的接線,實現(xiàn)接線的靈活及開放性。
7、實驗平臺信號接口板 一塊
用以實現(xiàn)PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
8、電腦桌一張(選配)
9、計算機一臺(用戶自備)
(1) 用于安裝CX-Program,組態(tài)等軟件,主要完成時設(shè)備的編程及對整個設(shè)備運行情況的總體監(jiān)控。
(2)硬件配置:基本配置要求P4 3.OG以上,內(nèi)存至少為256M,至少有一個USB接口、一個Rs232串口和一個空閑PCI插槽。操作系統(tǒng):Windows XP(專業(yè)版)+SP2。
(3)軟件及電纜:提供編程軟件CX-Program(演示版)、組態(tài)(演示版)軟件各—套,用于設(shè)備的編程和監(jiān)控;提供一根通訊電纜,用于上載、下載PLC程序。
四、實驗項目
(一) 基礎(chǔ)實驗
1、PLC認(rèn)識和操作實驗
2、PLC編程練習(xí)實驗
3、組態(tài)認(rèn)識實驗
4、組態(tài)編程練習(xí)實驗
5、直線電機的認(rèn)識實驗
(二)基于PLC控制的系統(tǒng)性實驗
6、基于PLC控制的單軸實驗
7、基于PLC控制的兩軸聯(lián)動控制實驗
8、基于PLC控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統(tǒng)性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯(lián)動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發(fā)工具
1、CBuilder Borland C++Bulider 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
3、Vb Microsoft Visual basic工具開發(fā)的基本庫函數(shù)示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
步進(jìn)電機二個:采用二個2相步進(jìn)電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
2、PLC一個
西門子S7-200 Smart SR40 輸入24點、輸出 16點;繼電器輸出,也可根據(jù)用戶要求配置不同型號、品牌的PLC主機。配有通訊下載電纜—個,用于連接PLC主機與上位編程軟件,實現(xiàn)PLC程序的上載、下載及PLC內(nèi)部數(shù)據(jù)監(jiān)控。
3、運動控制卡一塊
(1)32位PCI總線,即插即用
(2)所有輸入、輸出均采用光耦隔離,抗干擾性強
(3)2軸伺服/步進(jìn)電機控制,每軸可獨立運動,互不影響
(4)脈沖輸出的頻率誤差小于0.1%
(5)最大脈沖輸出頻率為2MHz
(6)脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
(7)梯形加/減速
(8)任意2軸直線插補
(9)最大插補速度1MHz
(10)運動中可以實時讀出邏輯位置、實際位置、驅(qū)動速度
(11)24路數(shù)字輸入,12路輸出
(12)每軸兩個限位輸入,可設(shè)置成無效,作為通用輸入使用
(13)支持在一個系統(tǒng)中使用多達(dá)16個控制卡
(14)支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統(tǒng)
4、步進(jìn)電機驅(qū)動器二個
(1)輸出電流:最大電流為2A
(2) 輸出方式:光光耦合器·開路集電極輸出
5、穩(wěn)壓直流電源 一個
(1)輸出電流:最大輸出電流為5A
(2)輸出電壓:24V
(3)輸出功率:120w
6、運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據(jù)自己的需要進(jìn)行相應(yīng)的接線,實現(xiàn)接線的靈活及開放性。
7、實驗平臺信號接口板 一塊
用以實現(xiàn)PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
8、電腦桌一張(選配)
9、計算機一臺(用戶自備)
(1) 用于安裝CX-Program,組態(tài)等軟件,主要完成時設(shè)備的編程及對整個設(shè)備運行情況的總體監(jiān)控。
(2)硬件配置:基本配置要求P4 3.OG以上,內(nèi)存至少為256M,至少有一個USB接口、一個Rs232串口和一個空閑PCI插槽。操作系統(tǒng):Windows XP(專業(yè)版)+SP2。
(3)軟件及電纜:提供編程軟件CX-Program(演示版)、組態(tài)(演示版)軟件各—套,用于設(shè)備的編程和監(jiān)控;提供一根通訊電纜,用于上載、下載PLC程序。
四、實驗項目
(一) 基礎(chǔ)實驗
1、PLC認(rèn)識和操作實驗
2、PLC編程練習(xí)實驗
3、組態(tài)認(rèn)識實驗
4、組態(tài)編程練習(xí)實驗
5、直線電機的認(rèn)識實驗
(二)基于PLC控制的系統(tǒng)性實驗
6、基于PLC控制的單軸實驗
7、基于PLC控制的兩軸聯(lián)動控制實驗
8、基于PLC控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統(tǒng)性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯(lián)動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發(fā)工具
1、CBuilder Borland C++Bulider 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
3、Vb Microsoft Visual basic工具開發(fā)的基本庫函數(shù)示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發(fā)的基本庫函數(shù)示例程序及源代碼