


更多相關產品
- LGWL-JT02型 物聯網智慧城市交通實訓系統
- LGWL-GC01型 智慧工廠應用實訓系統
- LGWL-CZ01型 開放式車載控制系統
- LGHL-01型 工業數據采集實訓臺
- LGHL-02型 工業互聯網技術應用實訓臺
- LGHL-03型 工業互聯網自動化控制實訓平臺
- LGHL-04型 工業互聯能耗監控實訓臺
- LGWL-FT01型 物聯網技術開發平臺
- LGWL-ED01型 窄帶物聯網開發實驗箱
- LGWL-BIS01型 感知層信息安全實驗箱
- LGWL-JJ01型 物聯網智能家居教學實訓系統
- LGWL-JT01型 智能交通管理實訓系統
- LGWL-JJ02型 網板型智能家居實訓系統
- LGWL-MX06型 物聯網教學科研平臺
- LG-BCNY01型 智能農業實驗系統
- LG-BCJT03型 智能交通實訓系統
- LG-BCJJ04型 智能家居系統(智能家居套裝)
- LG-BCJJ04A型 智能家居實訓套裝
- LG-BCJJ05型 智能家居實訓系統(柜式)
- LG-BCWL02型 物聯網綜合應用實訓系統
- LGWL-JJ03型 物聯網智能家居實訓系統
- LGWL-LJ01型 智能樓宇家居物聯網考核平臺
- LGWL-NY01型 物聯網智慧農業綜合實訓系統
- LGWL-NY02型 物聯網農業教學實訓系統
- LGWL-NY03型 智能溫室大棚實訓系統
- LGWL-JT02型 物聯網智能交通教學實訓系統
- LGWL-WL01型 物聯網智能物流倉儲實訓系統
- LGWL-A8型 物聯網教研平臺(物聯網實驗箱)
- LGWL-A9型 物聯網教研平臺(Cortex-A9版)
- LGWL-RFID01型 RFID物聯網教研平臺(RFID物聯網實驗箱)
- LGWL-A8Y型 移動互聯網教學科研平臺
- LGARM-A8型 ARM嵌入式教學科研平臺
- LGWL-A8X型 移動互聯網/物聯網教學科研平臺
- LGWL-RFID02型 RFID 物聯網教學科研平臺
- LGARM-A89型 物聯網創意實訓平臺
- LGWL-IPv6B型 IPv6 物聯網全功能實驗箱
- LGWL-A9Y型 移動互聯網/物聯網教學科研平臺
- LGWL-IPV6A型 IPV6無線傳感器網絡教學科研平臺
- LGWL-ZB01型 ZigBee無線傳感器網絡教學科研平臺
- LGWL-A8M型 無線傳感網教研平臺
LGWL-STM01型 物聯網移動機器人教研平臺
一、產品簡介
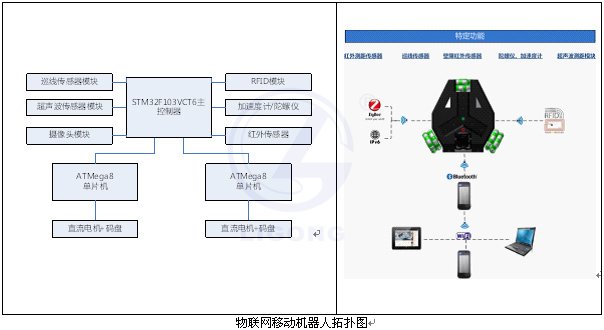
 物聯網移動機器人教研平臺,是一款基于STM32方案推出的功能全面、性能卓越的物聯網智能移動平臺,能夠自主運行、自主規劃,支持手機控制平臺運動,集成了陀螺儀、巡線傳感器8路、6個紅外避障傳感器、超橫波測距模塊、RFID等多種傳感器,支持3G(智能手機)、WiFi、Bluetooth和Zigbee無線網絡以及RFID等通信方式,是一款性能穩定且功能強大的物聯網移動平臺。
物聯網移動機器人教研平臺,是一款基于STM32方案推出的功能全面、性能卓越的物聯網智能移動平臺,能夠自主運行、自主規劃,支持手機控制平臺運動,集成了陀螺儀、巡線傳感器8路、6個紅外避障傳感器、超橫波測距模塊、RFID等多種傳感器,支持3G(智能手機)、WiFi、Bluetooth和Zigbee無線網絡以及RFID等通信方式,是一款性能穩定且功能強大的物聯網移動平臺。
機器人拓撲結構:
 二、產品特點
二、產品特點
第一章 手機控制機器人全向移動
第二章 高效的頭像識別技術應用,攝像頭角度(45~135°)連續可調
第三章 集成了RFID、IPV6/Zigbee、藍牙等多種通信模塊,方便擴展不同的組網方式
第四章 集成了光電、紅外等多種傳感器,可以通過編程實現不同的功能
第五章 即可用來開展MWSN的教學與科研,又可以用于機械自動化控制領域的教學與科研
三、平臺功能
第六章 手機遙控機器人運動
通過手機應用程序上的方向鍵控制機器人運動。
第七章 自動跟隨人物
基于手機視頻采集,通過harr訓練器檢測人體上半身的正面、側面和背面,計算出人體的 大小和中心位置,并控制機器人自動跟蹤人物。
第八章 遠程視頻采集,攝像頭角度調節
遠程計算機或者網絡終端通過WIFI網絡獲取手機攝像頭
采集的圖像信息,并遙控攝像頭角度在45-135°范圍內
變化。
第九章 巡線運動
機器人通過前方的巡線傳感器,在白色反光地面沿著黑色
任意曲線前進,以實現沿直線、圓弧等循跡功能。
第十章 近距離紅外測距功能
位于機器人正面下方的夏普測距紅外傳感器可以檢測距離在1-30cm范圍內的物體。
第十一章 RFID定位功能
車(機器人)載RFID讀卡器讀取環境中的RFID路標信息,根據路標的ID進行定位。
第十二章 環境建圖功能
機器人在靜止情況下,超聲波測距模塊每次旋轉一定角度(如5°)并采集一次環境深度 信息,旋轉一周后完成二唯環境建圖。
四、硬件資源
機器人拓撲結構:
第一章 手機控制機器人全向移動
第二章 高效的頭像識別技術應用,攝像頭角度(45~135°)連續可調
第三章 集成了RFID、IPV6/Zigbee、藍牙等多種通信模塊,方便擴展不同的組網方式
第四章 集成了光電、紅外等多種傳感器,可以通過編程實現不同的功能
第五章 即可用來開展MWSN的教學與科研,又可以用于機械自動化控制領域的教學與科研
三、平臺功能
第六章 手機遙控機器人運動
通過手機應用程序上的方向鍵控制機器人運動。
第七章 自動跟隨人物
基于手機視頻采集,通過harr訓練器檢測人體上半身的正面、側面和背面,計算出人體的 大小和中心位置,并控制機器人自動跟蹤人物。
第八章 遠程視頻采集,攝像頭角度調節
遠程計算機或者網絡終端通過WIFI網絡獲取手機攝像頭
采集的圖像信息,并遙控攝像頭角度在45-135°范圍內
變化。
第九章 巡線運動
機器人通過前方的巡線傳感器,在白色反光地面沿著黑色
任意曲線前進,以實現沿直線、圓弧等循跡功能。
第十章 近距離紅外測距功能
位于機器人正面下方的夏普測距紅外傳感器可以檢測距離在1-30cm范圍內的物體。
第十一章 RFID定位功能
車(機器人)載RFID讀卡器讀取環境中的RFID路標信息,根據路標的ID進行定位。
第十二章 環境建圖功能
機器人在靜止情況下,超聲波測距模塊每次旋轉一定角度(如5°)并采集一次環境深度 信息,旋轉一周后完成二唯環境建圖。
四、硬件資源
| 類別 | 配置 | |
| 機器人本體 | 主控制器 | STM32F103VCT6 |
| 單片機 | ATMega128 * 8 | |
| 底盤 | 3輪全向底盤,移動速度5m/s | |
| 電池 | 12V鋰電池,4300mAh | |
| 通信模塊 | 藍牙模塊 | HC-02 |
| RFID模塊 | 6-8cm,14443A | |
| Zigbee/IPv6模塊 | STM32W | |
| 擴展通信接口 | USB | |
| USART | ||
| 傳感器模塊 | 紅外測距傳感器 | 1-30cm |
| 巡線傳感器 | 雙排8路 | |
| 避障紅外傳感器 | 6個 | |
| 超聲波測距模塊 | 1-400cm | |
| 陀螺儀 | ADXRS613 | |
| 加速度計 | ADXL335 | |
| 選配 | 手機客戶端與服務端 | 安卓智能手機1GHz主頻雙核,512MB內存 |
| 超聲波測距模塊 | 范圍1-400cm | |
| 手抓機構 | ---- | |
五、軟件資源
| 類別 | 軟件資源 |
| STM32F103VCT6主控制器 | uC/OS-Ⅱ操作系統 |
| IAR開發環境 | |
| STM32F103VCT6應用軟件 | |
| ATMega128單片機 | ATMega128應用軟件 |
| IAR開發環境 | |
| 通訊模塊 | Contiki操作系統 |
| IPv6通信協議&ZigBee通信協議 | |
| Andriod手機軟件 | 無線線視頻傳輸與監控 |
| 機器人行為控制軟件包 | |
| 手機視頻處理軟件 |
六、部分實驗目錄清單
| 分類 | 實驗內容 |
| 基礎應用實驗 | 機器人程序下載仿真實驗 |
| 機器人程序更新實驗 | |
| 手機程序更新實驗 | |
| 通信實驗 | 修改藍牙名字實驗 |
| 基于WIFI遠程視頻采集實驗 | |
| 手機控制移動平臺實驗 | |
| RFID定位實驗 | |
| 頭像識別算法應用實驗 | |
| 人物跟隨實驗 | |
| 傳感器實驗 | 巡線運動 |
| 紅外測距實驗 | |
| 環境建圖實驗 |
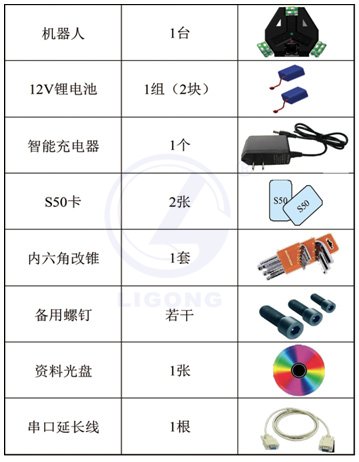
七、產品配件