


產(chǎn)品分類(lèi)
更多相關(guān)產(chǎn)品
- LGWL-JT02型 物聯(lián)網(wǎng)智慧城市交通實(shí)訓(xùn)系統(tǒng)
- LGWL-GC01型 智慧工廠應(yīng)用實(shí)訓(xùn)系統(tǒng)
- LGWL-CZ01型 開(kāi)放式車(chē)載控制系統(tǒng)
- LGHL-01型 工業(yè)數(shù)據(jù)采集實(shí)訓(xùn)臺(tái)
- LGHL-02型 工業(yè)互聯(lián)網(wǎng)技術(shù)應(yīng)用實(shí)訓(xùn)臺(tái)
- LGHL-03型 工業(yè)互聯(lián)網(wǎng)自動(dòng)化控制實(shí)訓(xùn)平臺(tái)
- LGHL-04型 工業(yè)互聯(lián)能耗監(jiān)控實(shí)訓(xùn)臺(tái)
- LGWL-FT01型 物聯(lián)網(wǎng)技術(shù)開(kāi)發(fā)平臺(tái)
- LGWL-ED01型 窄帶物聯(lián)網(wǎng)開(kāi)發(fā)實(shí)驗(yàn)箱
- LGWL-BIS01型 感知層信息安全實(shí)驗(yàn)箱
- LGWL-JJ01型 物聯(lián)網(wǎng)智能家居教學(xué)實(shí)訓(xùn)系統(tǒng)
- LGWL-JT01型 智能交通管理實(shí)訓(xùn)系統(tǒng)
- LGWL-JJ02型 網(wǎng)板型智能家居實(shí)訓(xùn)系統(tǒng)
- LGWL-MX06型 物聯(lián)網(wǎng)教學(xué)科研平臺(tái)
- LG-BCNY01型 智能農(nóng)業(yè)實(shí)驗(yàn)系統(tǒng)
- LG-BCJT03型 智能交通實(shí)訓(xùn)系統(tǒng)
- LG-BCJJ04型 智能家居系統(tǒng)(智能家居套裝)
- LG-BCJJ04A型 智能家居實(shí)訓(xùn)套裝
- LG-BCJJ05型 智能家居實(shí)訓(xùn)系統(tǒng)(柜式)
- LG-BCWL02型 物聯(lián)網(wǎng)綜合應(yīng)用實(shí)訓(xùn)系統(tǒng)
- LGWL-JJ03型 物聯(lián)網(wǎng)智能家居實(shí)訓(xùn)系統(tǒng)
- LGWL-LJ01型 智能樓宇家居物聯(lián)網(wǎng)考核平臺(tái)
- LGWL-NY01型 物聯(lián)網(wǎng)智慧農(nóng)業(yè)綜合實(shí)訓(xùn)系統(tǒng)
- LGWL-NY02型 物聯(lián)網(wǎng)農(nóng)業(yè)教學(xué)實(shí)訓(xùn)系統(tǒng)
- LGWL-NY03型 智能溫室大棚實(shí)訓(xùn)系統(tǒng)
- LGWL-JT02型 物聯(lián)網(wǎng)智能交通教學(xué)實(shí)訓(xùn)系統(tǒng)
- LGWL-WL01型 物聯(lián)網(wǎng)智能物流倉(cāng)儲(chǔ)實(shí)訓(xùn)系統(tǒng)
- LGWL-A8型 物聯(lián)網(wǎng)教研平臺(tái)(物聯(lián)網(wǎng)實(shí)驗(yàn)箱)
- LGWL-A9型 物聯(lián)網(wǎng)教研平臺(tái)(Cortex-A9版)
- LGWL-RFID01型 RFID物聯(lián)網(wǎng)教研平臺(tái)(RFID物聯(lián)網(wǎng)實(shí)驗(yàn)箱)
- LGWL-A8Y型 移動(dòng)互聯(lián)網(wǎng)教學(xué)科研平臺(tái)
- LGARM-A8型 ARM嵌入式教學(xué)科研平臺(tái)
- LGWL-A8X型 移動(dòng)互聯(lián)網(wǎng)/物聯(lián)網(wǎng)教學(xué)科研平臺(tái)
- LGWL-RFID02型 RFID 物聯(lián)網(wǎng)教學(xué)科研平臺(tái)
- LGARM-A89型 物聯(lián)網(wǎng)創(chuàng)意實(shí)訓(xùn)平臺(tái)
- LGWL-IPv6B型 IPv6 物聯(lián)網(wǎng)全功能實(shí)驗(yàn)箱
- LGWL-A9Y型 移動(dòng)互聯(lián)網(wǎng)/物聯(lián)網(wǎng)教學(xué)科研平臺(tái)
- LGWL-IPV6A型 IPV6無(wú)線傳感器網(wǎng)絡(luò)教學(xué)科研平臺(tái)
- LGWL-ZB01型 ZigBee無(wú)線傳感器網(wǎng)絡(luò)教學(xué)科研平臺(tái)
- LGWL-A8M型 無(wú)線傳感網(wǎng)教研平臺(tái)
LGWL-GK01型 智能港口物流交通實(shí)訓(xùn)系統(tǒng)
一、系統(tǒng)簡(jiǎn)介
LGWL-GK01型 智能港口物流交通實(shí)訓(xùn)系統(tǒng)以港口物流為背景,以貨物出入港口的流程為核心,以港口貨物的智能化裝卸與交通運(yùn)輸為研究?jī)?nèi)容,構(gòu)建的一套類(lèi)似真實(shí)的現(xiàn)代化港口物流交通實(shí)訓(xùn)系統(tǒng),主要模擬周轉(zhuǎn)于倉(cāng)庫(kù)與港口碼頭之間的貨物裝卸、運(yùn)輸、盤(pán)點(diǎn)的流程,同時(shí)對(duì)港口周邊環(huán)境進(jìn)行災(zāi)害預(yù)警。
訓(xùn)系統(tǒng)")
網(wǎng)運(yùn)輸實(shí)訓(xùn)平臺(tái)")
化實(shí)訓(xùn)設(shè)備")
當(dāng)智能小車(chē)離開(kāi)港口,智能港口出口道閘自動(dòng)打開(kāi),并顯示在此港口停留的所花的費(fèi)用,在點(diǎn)陣上實(shí)時(shí)的顯示出價(jià)格。
當(dāng)智能小車(chē)離開(kāi)港口后,會(huì)經(jīng)過(guò)幾個(gè)指定的站點(diǎn),*終到達(dá)倉(cāng)庫(kù),進(jìn)入倉(cāng)庫(kù)進(jìn)行裝卸貨和貨柜的盤(pán)點(diǎn)工作。
一個(gè)裝卸貨流程完畢后,小車(chē)將進(jìn)入執(zhí)行下一次裝卸貨任務(wù)。
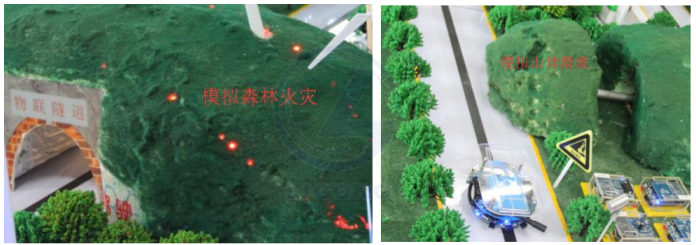
同時(shí),實(shí)訓(xùn)平臺(tái)上設(shè)置了一些自然災(zāi)害的模擬,如橋面震動(dòng)、森林火災(zāi)、山體滑坡等交通意外,通過(guò)災(zāi)害檢測(cè)傳感器的實(shí)時(shí)探測(cè)以及智能處理,實(shí)現(xiàn)港口環(huán)境預(yù)警系統(tǒng)。
二、系統(tǒng)構(gòu)成
港口物流交通實(shí)訓(xùn)系統(tǒng)覆蓋物聯(lián)網(wǎng)的傳感層、網(wǎng)絡(luò)鏈路層、網(wǎng)關(guān)、以及應(yīng)用層。智能網(wǎng)關(guān)是整個(gè)系統(tǒng)的核心,是連接傳感層與應(yīng)用層的橋梁。系統(tǒng)拓?fù)淙鐖D所示:

1、智能車(chē)輛運(yùn)輸系統(tǒng)
智能小車(chē)需要實(shí)現(xiàn)循跡、自動(dòng)駕駛、無(wú)線通訊、避障、車(chē)輛運(yùn)動(dòng)控制、路況信息采集等功能。目前小車(chē)搭載的系統(tǒng)包括:電機(jī)控制系統(tǒng),循跡系統(tǒng),避障系統(tǒng),Zigbee通訊系統(tǒng),WIFI無(wú)線通訊系統(tǒng), RFID系統(tǒng),環(huán)境溫濕度采集系統(tǒng)。
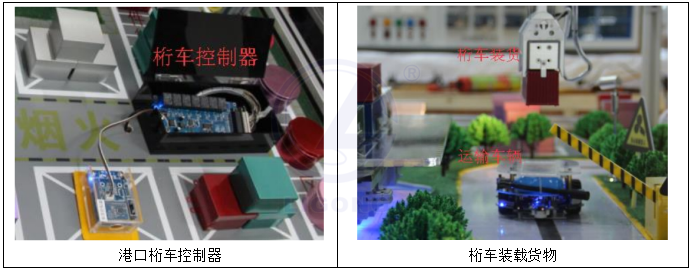
 2、集裝箱桁車(chē)裝卸貨系統(tǒng)
2、集裝箱桁車(chē)裝卸貨系統(tǒng)
智能桁車(chē)裝卸貨系統(tǒng),是港口物流系統(tǒng)的重要組成部分,主要由多自由度全方位電機(jī)構(gòu)成,采用單片機(jī)控制運(yùn)動(dòng)軌跡。當(dāng)小車(chē)到達(dá)裝卸貨指定地點(diǎn)時(shí),通過(guò)無(wú)線向管理平臺(tái)發(fā)出命令,管理平臺(tái)接收到后,通過(guò)無(wú)線通信向桁車(chē)控制器發(fā)送裝卸貨指令,桁車(chē)控制器接收到命令后,就按照指定的取貨位置,操作X/Y/Z軸電機(jī)運(yùn)動(dòng),從而實(shí)現(xiàn)貨物的自動(dòng)裝卸。貨物裝卸完成后,運(yùn)輸車(chē)自動(dòng)離開(kāi)。
該桁車(chē)結(jié)構(gòu)合理、剛性好,運(yùn)行平穩(wěn)、噪聲小,全自動(dòng)程控運(yùn)行,能夠穩(wěn)定可靠地實(shí)現(xiàn)港口貨物的全方位抓取與放置。
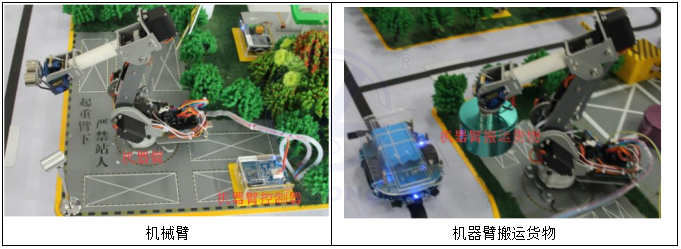
 3、機(jī)器臂裝卸貨系統(tǒng)
3、機(jī)器臂裝卸貨系統(tǒng)
對(duì)于不規(guī)則貨物,可采用機(jī)器臂控制系統(tǒng)裝卸貨。六自由度機(jī)械臂的臂部由大臂、小臂組成,一般具有兩個(gè)自由度,即伸縮、回轉(zhuǎn)、俯仰或升降,采用單片機(jī)控制運(yùn)動(dòng)軌跡。當(dāng)小車(chē)到達(dá)裝卸貨指定地點(diǎn)時(shí),通過(guò)無(wú)線向管理平臺(tái)發(fā)出命令,管理平臺(tái)接收到后,通過(guò)無(wú)線通信向機(jī)器臂控制器發(fā)送裝卸貨指令,控制器接收到命令后,就按照指定的取貨位置,操作機(jī)器臂經(jīng)過(guò)回轉(zhuǎn)、伸縮、升降、俯仰等幾組動(dòng)作組合,實(shí)現(xiàn)貨物的自動(dòng)裝卸。貨物裝卸完成后,運(yùn)輸車(chē)自動(dòng)離開(kāi)。
 4、智能集裝箱動(dòng)態(tài)感知顯示系統(tǒng)
4、智能集裝箱動(dòng)態(tài)感知顯示系統(tǒng)
智能顯示系統(tǒng)作為港口貨物統(tǒng)計(jì)的一個(gè)重要環(huán)節(jié),通過(guò)RFID技術(shù),將統(tǒng)計(jì)當(dāng)前港口總貨物數(shù)量,當(dāng)控制器將港口貨物提放到小車(chē)上離開(kāi)港口,信息機(jī)將自動(dòng)將港口貨物的數(shù)量減少一個(gè)。
 5、港口智能車(chē)輛出入ETC收費(fèi)管理系統(tǒng)
5、港口智能車(chē)輛出入ETC收費(fèi)管理系統(tǒng)
出入港口道閘識(shí)別開(kāi)啟系統(tǒng)( 又稱(chēng)智能車(chē)輛識(shí)別),利用車(chē)輛自動(dòng)識(shí)別(Automatic Vehicle Identification簡(jiǎn)稱(chēng)AVI)技術(shù)、網(wǎng)絡(luò)技術(shù)完成車(chē)輛與監(jiān)控中心之間的無(wú)線數(shù)據(jù)通訊,實(shí)現(xiàn)智能開(kāi)啟道閘系統(tǒng)。使用該系統(tǒng),車(chē)主只要在車(chē)窗上安裝感應(yīng)卡并錄入信息,通過(guò)出入口時(shí)便不用人工開(kāi)啟道閘,也無(wú)須停車(chē),將自動(dòng)識(shí)別車(chē)主身份從而開(kāi)啟道閘。
智能道閘系統(tǒng)實(shí)用化比較多的一個(gè)系統(tǒng),由于其無(wú)人化操作的優(yōu)越性以及成本方面帶來(lái)的優(yōu)勢(shì),在模擬智能交通過(guò)程中一定要加入這個(gè)模塊。
同時(shí)當(dāng)小車(chē)離開(kāi)港口時(shí),車(chē)輛離開(kāi)信息將在LED點(diǎn)陣屏上顯示出來(lái)。
 6、港口信息智能顯示與播報(bào)系統(tǒng)
6、港口信息智能顯示與播報(bào)系統(tǒng)
智能播報(bào)功能系統(tǒng),當(dāng)小車(chē)行駛至港口上貨區(qū)域時(shí),將進(jìn)行語(yǔ)音播報(bào)當(dāng)前車(chē)輛信息,并提示上貨提醒。
港口交通監(jiān)控系統(tǒng)作為智能交通系統(tǒng)的一個(gè)組成部分,在保證城市交通安全、暢通方面發(fā)揮著巨大的作用。現(xiàn)代除了對(duì)于傳統(tǒng)的交通管理需要監(jiān)控外,還需要對(duì)交通周邊的環(huán)境、斷橋、山洪、火災(zāi)、山體滑坡、等信息進(jìn)行監(jiān)控。
 8、智能交通燈與路燈管理
8、智能交通燈與路燈管理
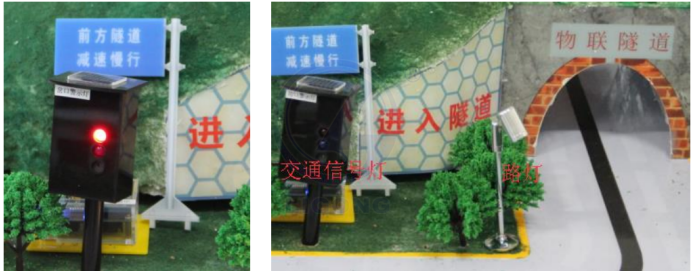
小車(chē)除了在港口內(nèi)部的道路系統(tǒng)之外,還配有港口外部的交通系統(tǒng),體現(xiàn)了港口外智能交通的便捷。車(chē)輛智能識(shí)別紅綠燈狀態(tài),通過(guò)Zigbee無(wú)線傳輸?shù)姆绞剑瑢?duì)當(dāng)前狀態(tài)采取對(duì)應(yīng)的措施,遵循交通規(guī)則“紅燈停綠燈行”的方式。紅綠燈通過(guò)無(wú)線的方式給網(wǎng)關(guān)發(fā)送對(duì)應(yīng)的燈的狀態(tài),小車(chē)判斷到燈的狀態(tài)后,執(zhí)行停止和循跡的智能化操作。
系統(tǒng)根據(jù)光線傳感器采集的光亮度值自動(dòng)控制路燈的打開(kāi)和關(guān)閉。當(dāng)光亮度值低于某一個(gè)閾值時(shí),即打開(kāi)路燈,當(dāng)光亮度值高于某一個(gè)閾值時(shí),關(guān)閉路燈,達(dá)到節(jié)能的目的。
 9、AGV無(wú)人駕駛車(chē)輛
9、AGV無(wú)人駕駛車(chē)輛
智能小車(chē)需要實(shí)現(xiàn)循跡、自動(dòng)駕駛、無(wú)線通訊、避障、車(chē)輛運(yùn)動(dòng)控制、路況信息采集等功能。目前小車(chē)搭載的系統(tǒng)包括:電機(jī)控制系統(tǒng),循跡系統(tǒng),避障系統(tǒng),WIFI通訊系統(tǒng),WIFI無(wú)線通訊系統(tǒng),攝像頭系統(tǒng),RFID系統(tǒng)。
 10、航空物流快運(yùn)系統(tǒng)
10、航空物流快運(yùn)系統(tǒng)
航空物流,是現(xiàn)代物流中的重要組成部分,其提供的是安全、快捷、方便和優(yōu)質(zhì)的服務(wù)。空運(yùn)以其迅捷、安全、準(zhǔn)時(shí)的贏得了相當(dāng)大的市場(chǎng),大大縮短了交貨期,對(duì)于物流供應(yīng)鏈加快資金周轉(zhuǎn)及循環(huán)起到了極大的促動(dòng)作用。
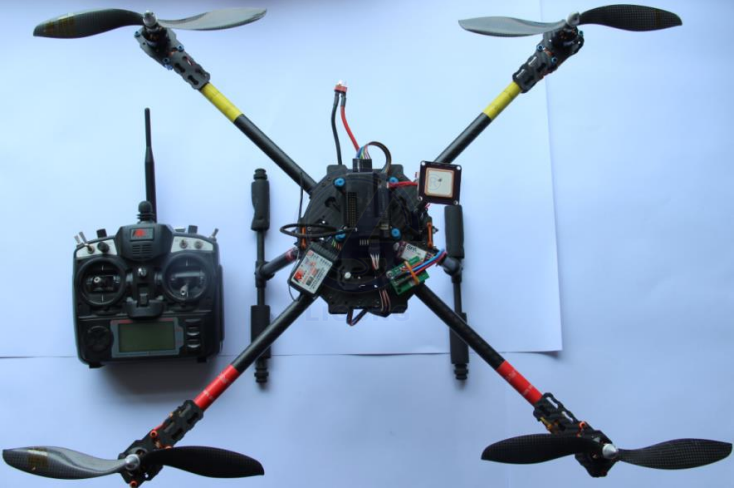
系統(tǒng)采用四軸飛行器作為航空運(yùn)輸?shù)妮d體,它主要由碳纖維四軸機(jī)架、ArduPilotMega 飛行姿態(tài)控制器、GPS定位模塊、915M無(wú)線數(shù)據(jù)傳輸模塊、電壓電流傳感器、鋰電池電壓測(cè)量模塊、2.4G 無(wú)線控制器、2.4G 無(wú)線接收器、三相直流無(wú)刷電機(jī)、三相直流無(wú)刷電機(jī)調(diào)速器、碳纖維1045正反槳、11.1V 3S鋰電池組、電池組平衡充電器等組成,提供全面的四軸飛行器開(kāi)發(fā)資料。
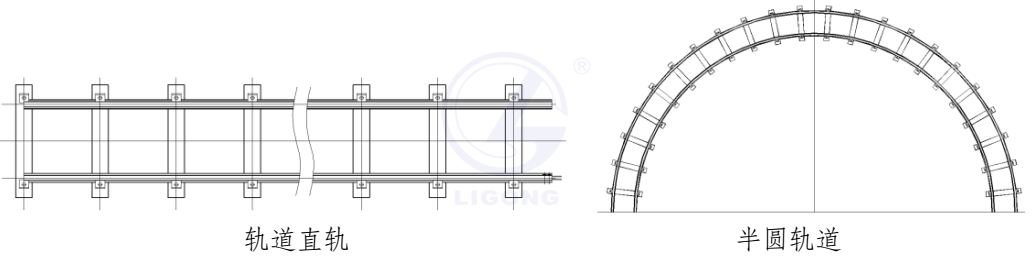
軌道交通系統(tǒng)主要由火車(chē)、軌道、以及軌道交通燈組件組成。由于鋁材有不會(huì)生銹,質(zhì)量比鐵輕,外形好看等優(yōu)點(diǎn),所以火車(chē)采用鋁制。軌道設(shè)計(jì)因考慮到需要導(dǎo)電,所以全部采用銅制工字型銅材,可設(shè)計(jì)成直軌或半圓軌。
 12、港口貨物數(shù)據(jù)庫(kù)管理軟件
12、港口貨物數(shù)據(jù)庫(kù)管理軟件
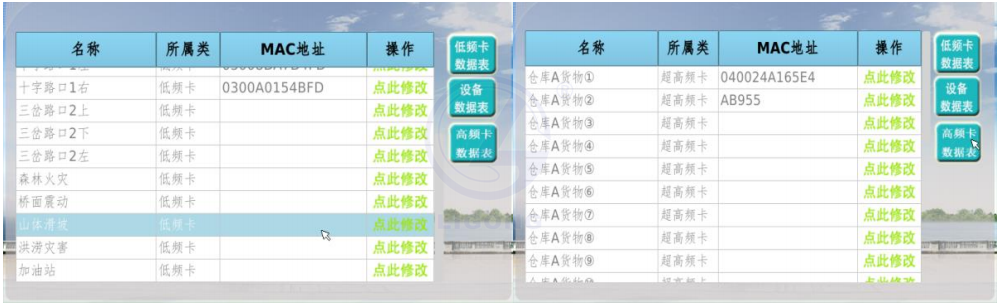
當(dāng)前數(shù)據(jù)庫(kù)信息的查詢(xún)與上傳,可及時(shí)顯示當(dāng)前數(shù)據(jù)庫(kù)中的內(nèi)容,上傳至云主機(jī)中去實(shí)時(shí)的跟新。
(1)數(shù)據(jù)庫(kù)更新表
 (2)低頻卡數(shù)據(jù)庫(kù)信息
(2)低頻卡數(shù)據(jù)庫(kù)信息
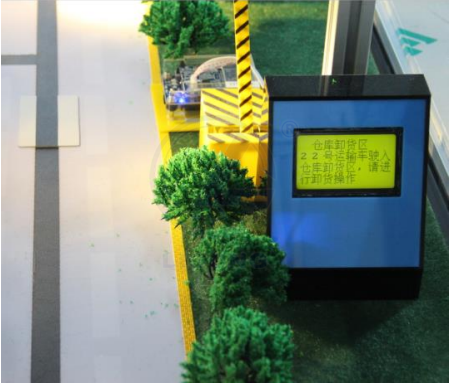
 13、港口貨物出入庫(kù)管理軟件
13、港口貨物出入庫(kù)管理軟件
智能顯示系統(tǒng)作為港口貨物統(tǒng)計(jì)的一個(gè)重要環(huán)節(jié),通過(guò)RFID技術(shù),將統(tǒng)計(jì)當(dāng)前港口總貨物數(shù)量,當(dāng)控制器將港口貨物提放到小車(chē)上離開(kāi)港口,信息機(jī)將自動(dòng)將港口貨物的數(shù)量減少一個(gè);

四、配置清單
LGWL-GK01型 智能港口物流交通實(shí)訓(xùn)系統(tǒng)以港口物流為背景,以貨物出入港口的流程為核心,以港口貨物的智能化裝卸與交通運(yùn)輸為研究?jī)?nèi)容,構(gòu)建的一套類(lèi)似真實(shí)的現(xiàn)代化港口物流交通實(shí)訓(xùn)系統(tǒng),主要模擬周轉(zhuǎn)于倉(cāng)庫(kù)與港口碼頭之間的貨物裝卸、運(yùn)輸、盤(pán)點(diǎn)的流程,同時(shí)對(duì)港口周邊環(huán)境進(jìn)行災(zāi)害預(yù)警。
系統(tǒng)外觀圖
當(dāng)有車(chē)輛進(jìn)入港口,智能道閘識(shí)別車(chē)輛后會(huì)自動(dòng)打開(kāi),并實(shí)時(shí)語(yǔ)音播報(bào)到達(dá)站目的地的信息。當(dāng)智能車(chē)輛準(zhǔn)確停放在裝卸貨指定地點(diǎn)時(shí),可手動(dòng)選擇要裝入車(chē)輛貨物的位置,然后自動(dòng)進(jìn)行裝卸貨過(guò)程。當(dāng)智能小車(chē)離開(kāi)港口,智能港口出口道閘自動(dòng)打開(kāi),并顯示在此港口停留的所花的費(fèi)用,在點(diǎn)陣上實(shí)時(shí)的顯示出價(jià)格。
當(dāng)智能小車(chē)離開(kāi)港口后,會(huì)經(jīng)過(guò)幾個(gè)指定的站點(diǎn),*終到達(dá)倉(cāng)庫(kù),進(jìn)入倉(cāng)庫(kù)進(jìn)行裝卸貨和貨柜的盤(pán)點(diǎn)工作。
一個(gè)裝卸貨流程完畢后,小車(chē)將進(jìn)入執(zhí)行下一次裝卸貨任務(wù)。
同時(shí),實(shí)訓(xùn)平臺(tái)上設(shè)置了一些自然災(zāi)害的模擬,如橋面震動(dòng)、森林火災(zāi)、山體滑坡等交通意外,通過(guò)災(zāi)害檢測(cè)傳感器的實(shí)時(shí)探測(cè)以及智能處理,實(shí)現(xiàn)港口環(huán)境預(yù)警系統(tǒng)。
二、系統(tǒng)構(gòu)成
港口物流交通實(shí)訓(xùn)系統(tǒng)覆蓋物聯(lián)網(wǎng)的傳感層、網(wǎng)絡(luò)鏈路層、網(wǎng)關(guān)、以及應(yīng)用層。智能網(wǎng)關(guān)是整個(gè)系統(tǒng)的核心,是連接傳感層與應(yīng)用層的橋梁。系統(tǒng)拓?fù)淙鐖D所示:
系統(tǒng)框架圖
三、系統(tǒng)功能1、智能車(chē)輛運(yùn)輸系統(tǒng)
智能小車(chē)需要實(shí)現(xiàn)循跡、自動(dòng)駕駛、無(wú)線通訊、避障、車(chē)輛運(yùn)動(dòng)控制、路況信息采集等功能。目前小車(chē)搭載的系統(tǒng)包括:電機(jī)控制系統(tǒng),循跡系統(tǒng),避障系統(tǒng),Zigbee通訊系統(tǒng),WIFI無(wú)線通訊系統(tǒng), RFID系統(tǒng),環(huán)境溫濕度采集系統(tǒng)。
智能桁車(chē)裝卸貨系統(tǒng),是港口物流系統(tǒng)的重要組成部分,主要由多自由度全方位電機(jī)構(gòu)成,采用單片機(jī)控制運(yùn)動(dòng)軌跡。當(dāng)小車(chē)到達(dá)裝卸貨指定地點(diǎn)時(shí),通過(guò)無(wú)線向管理平臺(tái)發(fā)出命令,管理平臺(tái)接收到后,通過(guò)無(wú)線通信向桁車(chē)控制器發(fā)送裝卸貨指令,桁車(chē)控制器接收到命令后,就按照指定的取貨位置,操作X/Y/Z軸電機(jī)運(yùn)動(dòng),從而實(shí)現(xiàn)貨物的自動(dòng)裝卸。貨物裝卸完成后,運(yùn)輸車(chē)自動(dòng)離開(kāi)。
該桁車(chē)結(jié)構(gòu)合理、剛性好,運(yùn)行平穩(wěn)、噪聲小,全自動(dòng)程控運(yùn)行,能夠穩(wěn)定可靠地實(shí)現(xiàn)港口貨物的全方位抓取與放置。
對(duì)于不規(guī)則貨物,可采用機(jī)器臂控制系統(tǒng)裝卸貨。六自由度機(jī)械臂的臂部由大臂、小臂組成,一般具有兩個(gè)自由度,即伸縮、回轉(zhuǎn)、俯仰或升降,采用單片機(jī)控制運(yùn)動(dòng)軌跡。當(dāng)小車(chē)到達(dá)裝卸貨指定地點(diǎn)時(shí),通過(guò)無(wú)線向管理平臺(tái)發(fā)出命令,管理平臺(tái)接收到后,通過(guò)無(wú)線通信向機(jī)器臂控制器發(fā)送裝卸貨指令,控制器接收到命令后,就按照指定的取貨位置,操作機(jī)器臂經(jīng)過(guò)回轉(zhuǎn)、伸縮、升降、俯仰等幾組動(dòng)作組合,實(shí)現(xiàn)貨物的自動(dòng)裝卸。貨物裝卸完成后,運(yùn)輸車(chē)自動(dòng)離開(kāi)。
智能顯示系統(tǒng)作為港口貨物統(tǒng)計(jì)的一個(gè)重要環(huán)節(jié),通過(guò)RFID技術(shù),將統(tǒng)計(jì)當(dāng)前港口總貨物數(shù)量,當(dāng)控制器將港口貨物提放到小車(chē)上離開(kāi)港口,信息機(jī)將自動(dòng)將港口貨物的數(shù)量減少一個(gè)。
出入港口道閘識(shí)別開(kāi)啟系統(tǒng)( 又稱(chēng)智能車(chē)輛識(shí)別),利用車(chē)輛自動(dòng)識(shí)別(Automatic Vehicle Identification簡(jiǎn)稱(chēng)AVI)技術(shù)、網(wǎng)絡(luò)技術(shù)完成車(chē)輛與監(jiān)控中心之間的無(wú)線數(shù)據(jù)通訊,實(shí)現(xiàn)智能開(kāi)啟道閘系統(tǒng)。使用該系統(tǒng),車(chē)主只要在車(chē)窗上安裝感應(yīng)卡并錄入信息,通過(guò)出入口時(shí)便不用人工開(kāi)啟道閘,也無(wú)須停車(chē),將自動(dòng)識(shí)別車(chē)主身份從而開(kāi)啟道閘。
智能道閘系統(tǒng)實(shí)用化比較多的一個(gè)系統(tǒng),由于其無(wú)人化操作的優(yōu)越性以及成本方面帶來(lái)的優(yōu)勢(shì),在模擬智能交通過(guò)程中一定要加入這個(gè)模塊。
同時(shí)當(dāng)小車(chē)離開(kāi)港口時(shí),車(chē)輛離開(kāi)信息將在LED點(diǎn)陣屏上顯示出來(lái)。
智能播報(bào)功能系統(tǒng),當(dāng)小車(chē)行駛至港口上貨區(qū)域時(shí),將進(jìn)行語(yǔ)音播報(bào)當(dāng)前車(chē)輛信息,并提示上貨提醒。
小車(chē)到達(dá)港口上貨處
7、港口環(huán)境災(zāi)害預(yù)警系統(tǒng)港口交通監(jiān)控系統(tǒng)作為智能交通系統(tǒng)的一個(gè)組成部分,在保證城市交通安全、暢通方面發(fā)揮著巨大的作用。現(xiàn)代除了對(duì)于傳統(tǒng)的交通管理需要監(jiān)控外,還需要對(duì)交通周邊的環(huán)境、斷橋、山洪、火災(zāi)、山體滑坡、等信息進(jìn)行監(jiān)控。
小車(chē)除了在港口內(nèi)部的道路系統(tǒng)之外,還配有港口外部的交通系統(tǒng),體現(xiàn)了港口外智能交通的便捷。車(chē)輛智能識(shí)別紅綠燈狀態(tài),通過(guò)Zigbee無(wú)線傳輸?shù)姆绞剑瑢?duì)當(dāng)前狀態(tài)采取對(duì)應(yīng)的措施,遵循交通規(guī)則“紅燈停綠燈行”的方式。紅綠燈通過(guò)無(wú)線的方式給網(wǎng)關(guān)發(fā)送對(duì)應(yīng)的燈的狀態(tài),小車(chē)判斷到燈的狀態(tài)后,執(zhí)行停止和循跡的智能化操作。
系統(tǒng)根據(jù)光線傳感器采集的光亮度值自動(dòng)控制路燈的打開(kāi)和關(guān)閉。當(dāng)光亮度值低于某一個(gè)閾值時(shí),即打開(kāi)路燈,當(dāng)光亮度值高于某一個(gè)閾值時(shí),關(guān)閉路燈,達(dá)到節(jié)能的目的。
智能小車(chē)需要實(shí)現(xiàn)循跡、自動(dòng)駕駛、無(wú)線通訊、避障、車(chē)輛運(yùn)動(dòng)控制、路況信息采集等功能。目前小車(chē)搭載的系統(tǒng)包括:電機(jī)控制系統(tǒng),循跡系統(tǒng),避障系統(tǒng),WIFI通訊系統(tǒng),WIFI無(wú)線通訊系統(tǒng),攝像頭系統(tǒng),RFID系統(tǒng)。
航空物流,是現(xiàn)代物流中的重要組成部分,其提供的是安全、快捷、方便和優(yōu)質(zhì)的服務(wù)。空運(yùn)以其迅捷、安全、準(zhǔn)時(shí)的贏得了相當(dāng)大的市場(chǎng),大大縮短了交貨期,對(duì)于物流供應(yīng)鏈加快資金周轉(zhuǎn)及循環(huán)起到了極大的促動(dòng)作用。
系統(tǒng)采用四軸飛行器作為航空運(yùn)輸?shù)妮d體,它主要由碳纖維四軸機(jī)架、ArduPilotMega 飛行姿態(tài)控制器、GPS定位模塊、915M無(wú)線數(shù)據(jù)傳輸模塊、電壓電流傳感器、鋰電池電壓測(cè)量模塊、2.4G 無(wú)線控制器、2.4G 無(wú)線接收器、三相直流無(wú)刷電機(jī)、三相直流無(wú)刷電機(jī)調(diào)速器、碳纖維1045正反槳、11.1V 3S鋰電池組、電池組平衡充電器等組成,提供全面的四軸飛行器開(kāi)發(fā)資料。
遙控器與四軸飛行器
11、港口軌道交通系統(tǒng)軌道交通系統(tǒng)主要由火車(chē)、軌道、以及軌道交通燈組件組成。由于鋁材有不會(huì)生銹,質(zhì)量比鐵輕,外形好看等優(yōu)點(diǎn),所以火車(chē)采用鋁制。軌道設(shè)計(jì)因考慮到需要導(dǎo)電,所以全部采用銅制工字型銅材,可設(shè)計(jì)成直軌或半圓軌。
當(dāng)前數(shù)據(jù)庫(kù)信息的查詢(xún)與上傳,可及時(shí)顯示當(dāng)前數(shù)據(jù)庫(kù)中的內(nèi)容,上傳至云主機(jī)中去實(shí)時(shí)的跟新。
(1)數(shù)據(jù)庫(kù)更新表
智能顯示系統(tǒng)作為港口貨物統(tǒng)計(jì)的一個(gè)重要環(huán)節(jié),通過(guò)RFID技術(shù),將統(tǒng)計(jì)當(dāng)前港口總貨物數(shù)量,當(dāng)控制器將港口貨物提放到小車(chē)上離開(kāi)港口,信息機(jī)將自動(dòng)將港口貨物的數(shù)量減少一個(gè);
貨物統(tǒng)計(jì)
當(dāng)貨物被運(yùn)送至卸貨區(qū)域時(shí),小車(chē)信息機(jī)顯示并提示貨物安全運(yùn)送至目的地,如果貨物長(zhǎng)時(shí)間未送至卸貨區(qū)域時(shí),將顯示提示信息。四、配置清單
| 序號(hào) | 項(xiàng)目名稱(chēng) | 數(shù)量 |
| 1 | 智能網(wǎng)關(guān) | 1 臺(tái) |
| 2 | 桁車(chē)裝卸機(jī)器 | 2 臺(tái) |
| 3 | 桁車(chē)裝卸控制器 | 2 臺(tái) |
| 4 | 六自由度機(jī)器臂 | 2 臺(tái) |
| 5 | 六自由度機(jī)器臂控制器 | 2 個(gè) |
| 6 | RFID 超高頻讀寫(xiě)器 | 2 臺(tái) |
| 7 | RFID 防干擾標(biāo)簽 | 150 |
| 8 | 915M 多通道讀寫(xiě)天線 | 5 個(gè) |
| 9 | 港口物流集裝箱 | 150 個(gè) |
| 10 | 港口大型貨輪 | 1 艘 |
| 11 | 紅綠燈控制系統(tǒng) | 2個(gè) |
| 12 | 交通燈控制器 | 1 |
| 13 | 智能道閘 | 4 個(gè) |
| 14 | 道閘控制器 | 4 個(gè) |
| 15 | 智能小車(chē) | 2 臺(tái) |
| 16 | 小車(chē)循跡標(biāo)簽 | 50 張 |
| 17 | 智能倉(cāng)庫(kù)模型 | 2 個(gè) |
| 18 | 山體位移控制器 | 1 套 |
| 19 | 森林火災(zāi)控制器 | 1 套 |
| 20 | 橋面震動(dòng)控制器 | 1 套 |
| 21 | 智能顯示屏 | 2 套 |
| 22 | 智能語(yǔ)音播報(bào)控制器 | 2 套 |
| 23 | 港口物流交通系統(tǒng)模型 | 1 套 |
| 24 | AGV 無(wú)人車(chē) | 1 輛 |
| 25 | 四軸飛行器 | 1 臺(tái) |
| 26 | 軌道交通火車(chē) | 1 臺(tái) |
| 27 | 火車(chē)軌道 | 1 個(gè) |
| 28 | 智能桁車(chē)貨物裝卸軟件系統(tǒng) | 1 |
| 29 | 智能機(jī)器臂貨物裝卸軟件系統(tǒng) | 1 |
| 30 | 港口貨物自動(dòng)盤(pán)點(diǎn)管理軟件 | 1 |
| 31 | 港口貨物出入庫(kù)管理軟件 | 1 |
| 32 | 港口 ETC 收費(fèi)管理軟件 | 1 |
| 33 | 智能路障識(shí)別分析軟件 | 1 |
| 34 | 港口車(chē)輛調(diào)度管理軟件 | 1 |
| 35 | AGV 無(wú)人駕駛車(chē)輛軟件 | 1 |
| 36 | 四軸飛行器飛行控制軟件 | 1 |